
2025 Guide: How to Choose the Right PM Stepper Motor for Your Project
In the evolving landscape of automation and robotics, choosing the right PM stepper motor is crucial. According to a recent market report from Research and Markets, the global stepper motor market is expected to reach $5.23 billion by 2026, highlighting the growing demand for precision control. Understanding the characteristics of PM stepper motors can significantly impact project outcomes.
Expert opinions shed light on this topic. Dr. Emily Chen, a renowned specialist in motion control systems, once remarked, "The choice of a PM stepper motor can either make or break your project's success." This emphasizes the importance of thorough evaluation. Selecting motors that align with specific project needs requires careful consideration of torque, size, and efficiency.
Unfortunately, many projects fall short due to a lack of understanding. Engineers often overlook critical specifications. This can lead to inefficiencies or even complete project failures. The journey of choosing the right PM stepper motor is not as straightforward as one might think. It's a path that demands attention to detail and a willingness to learn from past mistakes.

Understanding PM Stepper Motors and Their Applications
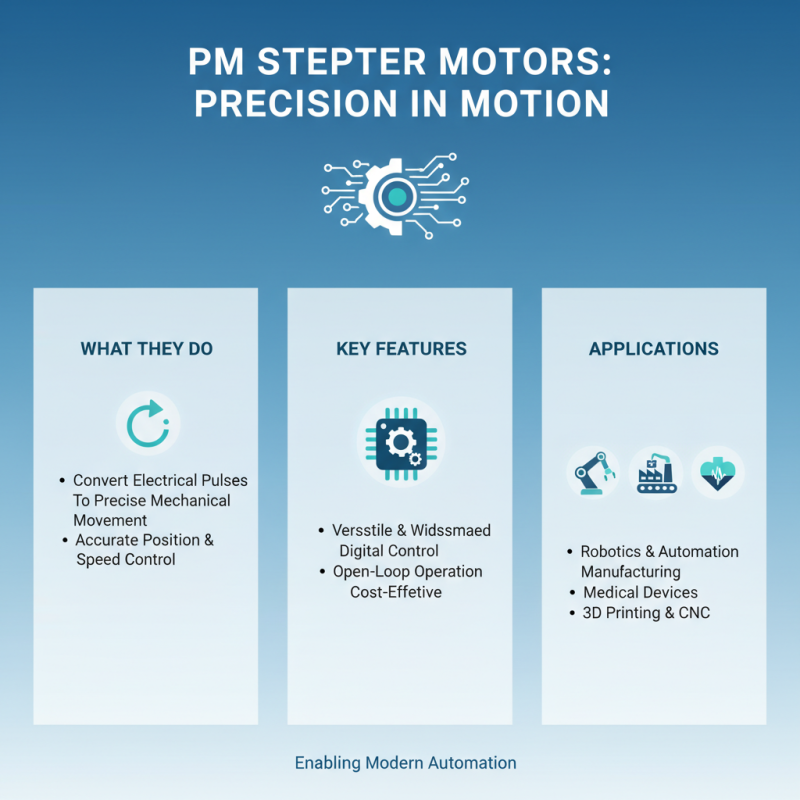
PM stepper motors are versatile and widely used in various applications. They convert electrical pulses into precise mechanical movement. These motors play a crucial role in robotics, manufacturing, and medical devices. Their ability to control position and speed accurately makes them ideal for automation tasks.
When selecting a PM stepper motor, consider your project's specific needs. What is the required torque? How fast does it need to move? These questions guide your choices. Pay attention to factors like voltage, current, and steps per revolution. Each motor has distinct characteristics. Some may not fit your requirements perfectly.
It's also essential to assess power supply compatibility. Improper voltage can lead to inefficiencies. Ponder the overall system design. Will the motor integrate smoothly with other components? Considerations like heat generation and noise levels can influence your project. Balancing these factors is a challenge but crucial for success.
Related Posts
-
Why Choose Permanent Magnet Stepper Motors for Your Next Project?
-

Top 10 Benefits of Using Permanent Magnet Motors in Modern Applications
-

What is a Permanent Magnet DC Motor and How Does it Work
-

What is Rotor Magnet and How Does it Work in Electric Motors
-
2025 Top 5 Permanent Magnet DC Motor 180V Options for Enhanced Performance
-
Unlocking Efficiency: The Science Behind Using Magnets for Motors in Modern Technology